Guten Tag, hier eine kleine Vorstellung eines aktuellen Projektes zur Gewässervermessung. Es wird ein leistungsfähiges Bootssonar von AIRMAR verwendet (P66 DT). Dieses analysiert mit einem 600 Watt Geber die Bodenstrukturen bis in 300m Tiefe. Der Sonarstrahl breitet sich unter Wasser kegelförmig aus und deckt in 43 Meter Tiefe einen Kreis mit dem Durchmesser von 8 Meter ab. Die Sonardaten werden gemeinsam mit den ermittelten Koordinaten (3-5m Genauigkeit) auf einer SD Karte gespeichert. Die verwendete Plattform (Pixhawk Autopilot) kann auch teilautonom eingesetzt werden, um mit dem Boot ein eingespeichertes Raster automatisch abzufahren.
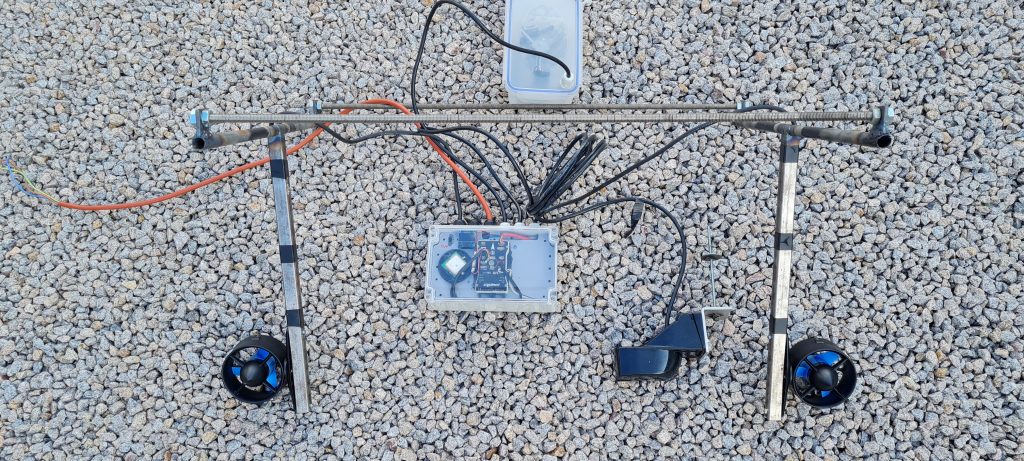
Je nach den gewünschten Anforderungen kann das Modul gewässerschonend auf ein Kajak oder SUP montiert werden, um paddelnd im Einklang mit der Natur ein Gewässer zu kartografieren. Mit dem Kajak lässt sich eine Strecke von 8-10km in der Stunde erzielen. Müssen größere Flächen abgedeckt werden kann der Autopilot am Kajak mit zwei kleinen Elektromotoren verwendet werden (5 km/h). Während dem Scanvorgang wird das Fahrzeug von Land aus überwacht und kann mit einer Fernsteuerung jederzeit gestoppt, oder um Hindernisse gelenkt werden. Auch dieser Einsatz erfolgt lautlos und durch die Montage der Motoren nah an der Wasseroberfläche wird eine Grundberührung vermieden.
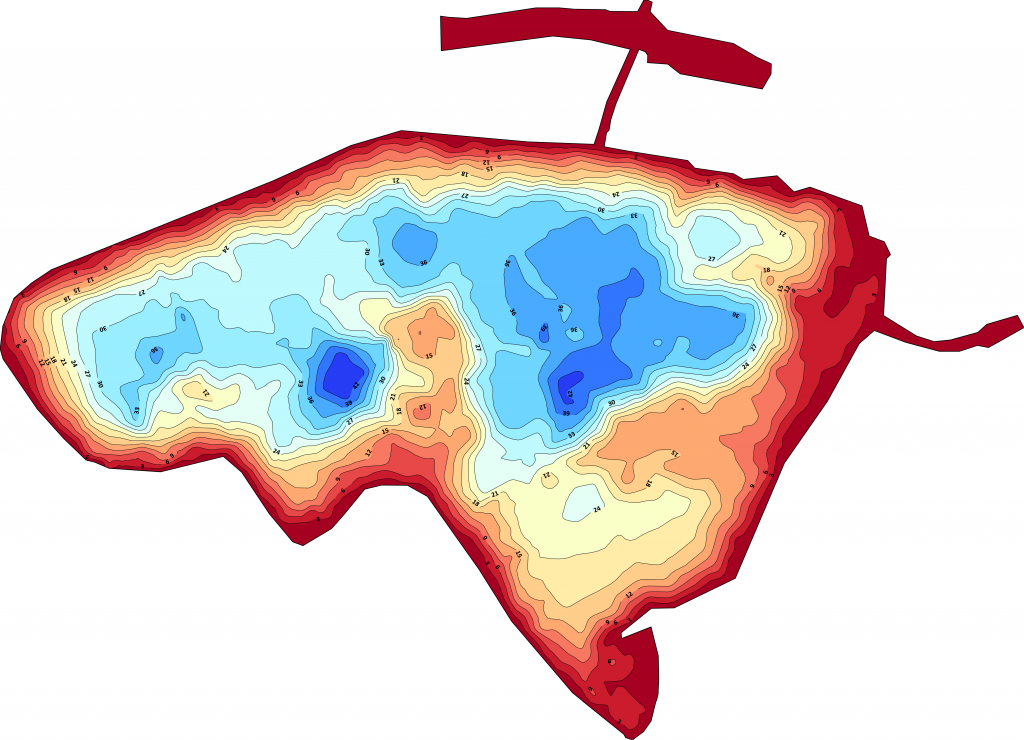
An Land werden die Daten mit der Software Reefmaster bearbeitet, von Messfehlern bereinigt und an die jeweiligen Kartenwünsche angepasst.
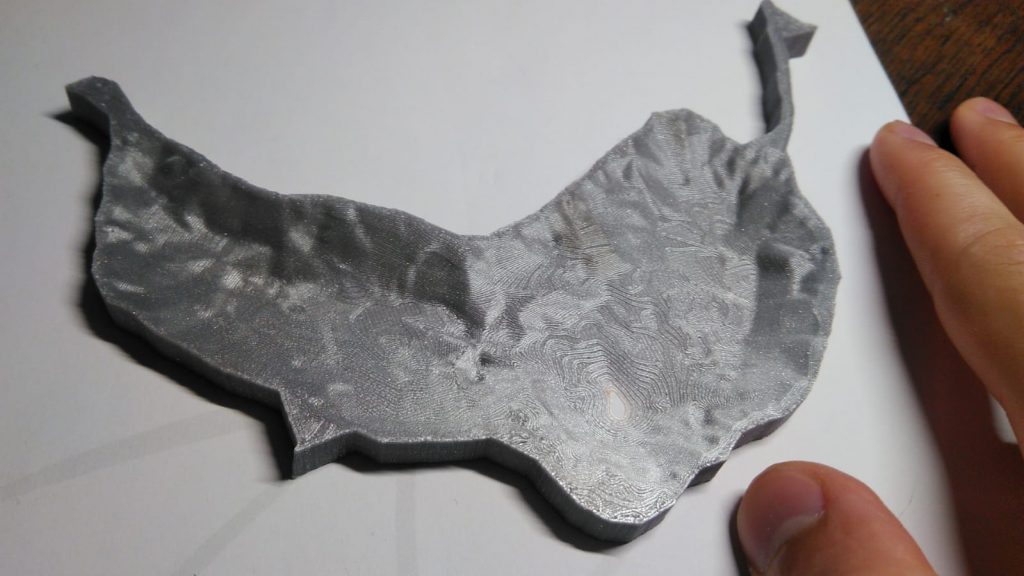
Als Ergebnis sind diverse Kartenformate möglich. Neben Bildern, Kartenprodukten für GIS Anwendungen und Karten für Fischfinder Kartenplotter sind auch 3D Darstellungen mit Hilfe von 3D-Druckern und CNC Fräsen möglich, um Tiefenprofile besser zu veranschaulichen. Anbei ein 3D gedrucktes Tiefenprofil.